V-categories(2)
V-category(1)
A \(\mathcal{V}\) category, given a symmetric monoidal preorder \(\mathcal{V}=(V,\leq,I,\otimes)\)
To specify the category \(\mathcal{X}\), one specifies:
A set \(Ob(\mathcal{X})\) whose elements are called objects
A hom-object for every pair of objects in \(Ob(\mathcal{X})\), written \(\mathcal{X}(x,y) \in V\)
The following properties must be satisfied:
\(\forall x \in Ob(\mathcal{X}):\) \(I \leq \mathcal{X}(x,x)\)
\(\forall x,y,z \in Ob(\mathcal{X}):\) \(\mathcal{X}(x,y)\otimes\mathcal{X}(y,z) \leq \mathcal{X}(x,z)\)
We call \(\mathcal{V}\) the base of enrichment for \(\mathcal{X}\) or say that \(\mathcal{X}\) is enriched in \(\mathcal{V}\).
Linked by
- Getting from A to B: referenced
- Bool-category: referenced
- Bool-category: referenced
- Preorders are Bool-categories: referenced
- Proof: referenced
- Proof: referenced
- Proof: referenced
- Lawvere metric space: referenced
- Lawvere metric space: referenced
- Lawvere metric space: referenced
- Exercise 2-55: referenced
- Exercise 2-61: referenced
- Exercise 2-62: referenced
- Exercise 2-62: referenced
- Exercise 2-62: referenced
- Exercise 2-63: referenced
- Induced V-categories from monoidal monotones: referenced
- Induced V-categories from monoidal monotones: referenced
- Proof: referenced
- Proof: referenced
- Proof: referenced
- V-functor: referenced
- Bool-functors: referenced
- Exercise 2-73: referenced
- Exercise 2-73: referenced
- Exercise 2-73: referenced
- Exercise 2-73: referenced
- Solution: referenced
- Solution: referenced
- Solution: referenced
- V-category product: referenced
- V-category product: referenced
- Cost-category product: referenced
- Cost-category product: referenced
- Exercise 2-75: referenced
- Exercise 2-78: referenced
- Self-enriched category: referenced
- Self-enriched category: referenced
- Self-enriched category: referenced
- Feasibility relationships as Bool-profunctors: referenced
- V-profunctors: referenced
- V-profunctor: referenced
- Bool-profunctors: referenced
- The unit profunctor: referenced
- Proof: referenced
- Proof: referenced
- Exercise 4-26: referenced
- V-profunctor collage: referenced
- Monoidal categories: referenced
- Monoidal categories: referenced
- Categories enriched in a symmetric monoidal category: referenced
Bool-category(1)
Consider the following preorder:
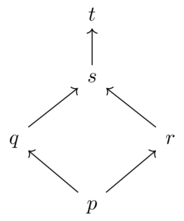
As a Bool-category, the objects are \(Ob(\mathcal{X})=\{p,q,r,s,t\}\).
For every pair, we need an element of Bool, so make it true if \(x\leq y\)
\(true\) is the monoidal unit of Bool, and this obeys the two constraints of a \(\mathcal{V}\) category.
We can represent the binary relation (hom-object) with a table:
\(\leq\) p q r s t p T T T T T q F T F T T r F F T T T s F F F T T t F F F F T